A* ALGORITHM BASICS FOR PATH FINDING A* , widely used known form of best-first search & path planning algorithm nowadays in mobile robots,games. this is the function for A*, f(n) = g(n) + h(n) g ( n ) is the cost of the path from the start node to n , and h ( n ) is a heuristic function that estimates the cost of the cheapest path from n to the goal This will find cheapest f(n) value in neighbor nodes to archive goal node. check below image A to B path finding with g(n),h(n),f(n) value In the final level check below image Now we will check the Algorithm // A* Search Algorithm 1. Initialize the open list 2. Initialize the closed list put the starting node on the open list (you can leave its f at zero) 3. ...
A* ALGORITHM BASICS FOR PATH FINDING
A*, widely used known form of best-first search & path planning algorithm nowadays in mobile robots,games.
this is the function for A*,
f(n) = g(n) + h(n)
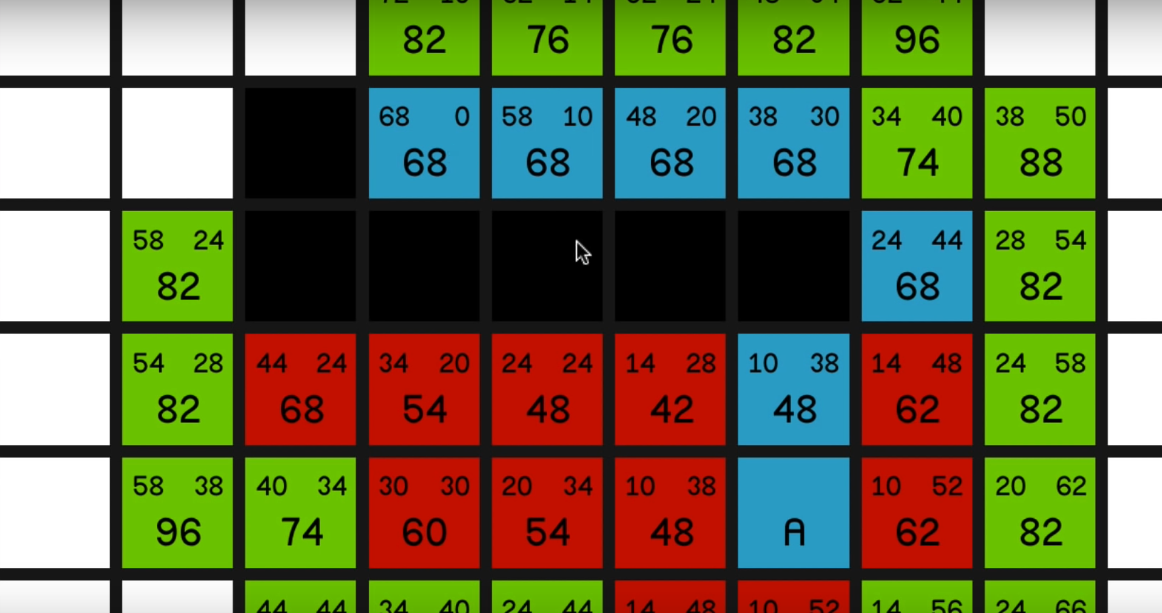
g(n) is the cost of the path from the start node to n, and h(n) is a heuristic function that estimates the cost of the cheapest path from n to the goal
This will find cheapest f(n) value in neighbor nodes to archive goal node.
check below image A to B path finding with g(n),h(n),f(n) value

In the final level check below image
Now we will check the Algorithm
// A* Search Algorithm
1. Initialize the open list
2. Initialize the closed list
put the starting node on the open
list (you can leave its f at zero)
3. while the open list is not empty
a) find the node with the least f on
the open list, call it "q"
b) pop q off the open list
c) generate q's 8 successors and set their
parents to q
d) for each successor
i) if successor is the goal, stop search
successor.g = q.g + distance between
successor and q
successor.h = distance from goal to
successor (This can be done using many
ways, we will discuss three heuristics-
Manhattan, Diagonal and Euclidean
Heuristics)
successor.f = successor.g + successor.h
ii) if a node with the same position as
successor is in the OPEN list which has a
lower f than successor, skip this successor
iii) if a node with the same position as
successor is in the CLOSED list which has
a lower f than successor, skip this successor
otherwise, add the node to the open list
end (for loop)
e) push q on the closed list
end (while loop)
Properties of A*
On finite graphs with non-negative edge weights A* is guaranteed to terminate and is complete.A search algorithm is said to be admissible if it is guaranteed to return an optimal solution .
Algorithm A is optimally efficient with respect to a set of alternative algorithms .
check below for the easy understanding of A*
It is nothing but the sum of absolute values of differences in the goal’s x and y coordinates and the current cell’s x and y coordinates respectively,


HEURISTICS METHODS
1) Manhattan Distance –It is nothing but the sum of absolute values of differences in the goal’s x and y coordinates and the current cell’s x and y coordinates respectively,
i.e., h = abs (current_cell.x – goal.x) +
abs (current_cell.y – goal.y)
When to use this heuristic? – When we are allowed to move only in four directions only (right, left, top, bottom)
2) Diagonal Distance-
It is nothing but the maximum of absolute values of differences in the goal’s x and y coordinates and the current cell’s x and y coordinates respectively,
It is nothing but the maximum of absolute values of differences in the goal’s x and y coordinates and the current cell’s x and y coordinates respectively,
i.e., h = max { abs(current_cell.x – goal.x),
abs(current_cell.y – goal.y) }
When to use this heuristic? – When we are allowed to move in eight directions only (similar to a move of a King in Chess)
When to use this heuristic? – When we are allowed to move in eight directions only (similar to a move of a King in Chess)
3) Euclidean Distance-
As it is clear from its name, it is nothing but the distance between the current cell and the goal cell using the distance formula
As it is clear from its name, it is nothing but the distance between the current cell and the goal cell using the distance formula
h = sqrt ( (current_cell.x – goal.x)2 +
(current_cell.y – goal.y)2 )
When to use this heuristic? – When we are allowed to move in any directions.
When to use this heuristic? – When we are allowed to move in any directions.
Find best STEM Classes in Delta BC
ReplyDeleteUltimate 3D Printing Classes for kids in Vancouver
A* is to slow for larger maps. In the plain version no one is using the algorithm for computer games. What is used in reality is a combination of A* with heuristics, for example by dividing the map into smaller sections and plan each section by it's own.
ReplyDeleteRobotics Training in Noida
ReplyDeleteAI Patasala is a pioneering platform for Artificial Intelligence Training in Hyderabad. Join now to avail the advantages that come with Artificial Intelligence Training in Hyderabad and begin your exciting career in this field by becoming a part of AI Patasala.
ReplyDeleteAI Training in Hyderabad
cloudkeeda
ReplyDeletewhat is azure
azure free account
azure data factory
Azure Data Factory Interview Questions
bootaa
bootaa
Really an awesome blog, informative and knowledgeable content. Keep sharing more stuff like this. Thank you.
ReplyDeleteAI Patasala Data Science Course in Hyderabad